
Абсолютно каждый человек старается использовать все свои физиологические возможности для достижения той или иной цели. И в какой-то момент своей жизни каждый из нас использовал комбинацию зрения и осязания для того, чтобы, например, найти что-то скрытое под диванными подушками. И если эе интерполировать данный опыт на технологии, а именно на роботов, то, объективно говоря, на данный момент робототехника и искусственный интеллект не на столько развиты, чтобы быть способными делать это.
И именно поэтому уже на протяжении довольно-таки длительного времени исследователи робототехники со всего мира пытаются наделить свои творения такими же возможностями, какими обладают и люди. Например ещё в 2019 году команда учёных из Массачусетского технологического института использовала комбинацию тактильных датчиков и искусственного интеллекта с той целью, чтобы позволить роботу идентифицировать объекты исключительно на ощупь. Теперь же стало известно о том, что отдельная группа учёных из Массачусетского технологического института всё-таки сумела построить машину, которая в свою очередь может находить вещи, которые она не может видеть изначально за счёт применения некого подобия логического мышления.
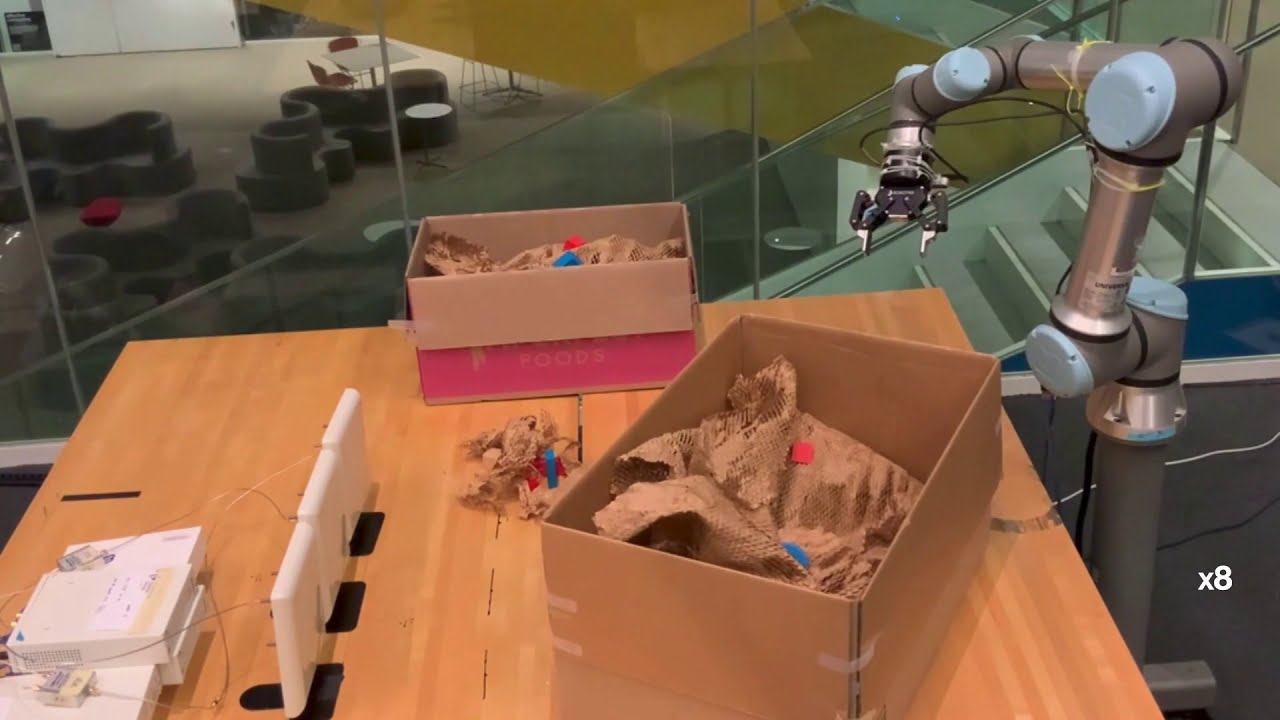
Радиочастотный захват, именно так называется свежая технология, зависит от использования в совокупности с установленной на запястье камерой и радиочастотным считывателем, который необходим для того, чтобы отыскать и поднять объект. Пока на предмете, который нужно найти и поднять, присутствует радиочастотная метка, робот может найти его, даже в том случае, если он спрятан за такими вещами, как, к примеру, обёрточная бумага. Исследователи планируют назвать коммерческую версию данной технологии «RF Grasp». И да, у них уже имеется довольно-таки чёткое видение того, где и как изобретение может применяться и какую пользу оно может оказать. Таким образом команда учёных уже сейчас видит, что технология «RF Grasp» способна помочь таким компаниям, как Amazon.
При помощи «RF Grasp» данный торговый гигант сможет ещё больше автоматизировать и оптимизировать свои склады. «Восприятие и выбор — это два основополагающих столба в отрасли робототехники на сегодняшний день», — сказал адъюнкт-профессор Альберто Родригес, один из исследователей, который принимал непосредственное участие в работе над проектом. Команда также рассказала внутреннему изданию института, MIT News, о том что самым сложным аспектом во время разработки «RF Grasp» являлась непосредственная интеграция как зрения и тактильности в процесс принятия решений. Они сравнивают текущую систему с тем, как мы с вами можем реагировать на звук на расстоянии, поворачивая голову для того, чтобы точно определить его источник. «RF Grasp» использует свой RF-считыватель для поиска помеченных объектов, но чем ближе он к чему-то приближается, тем больше он начинает полагаться на ту информацию, которая поступает через собственную камеру, то есть условное «зрение».







