
Тема мягкой робототехники привлекает к себе внимание все большего количества человека – в частности потому, что такие виды роботов как правило обходятся дешевле, легче управляются и могут осуществлять значительно более широкий спектр возможностей в сравнении с твердыми роботами. Вот и талантливая команда робототехников из Гарвардской Школы Робототехники в США сегодня представила свою новую разработку мягкого робота, управляемого исключительно при помощи потоков воздуха, которые поступают по специальным трубкам – и при этом его ареал применения действительно широк, но специалисты в основном намекают на применение в условиях невесомости.
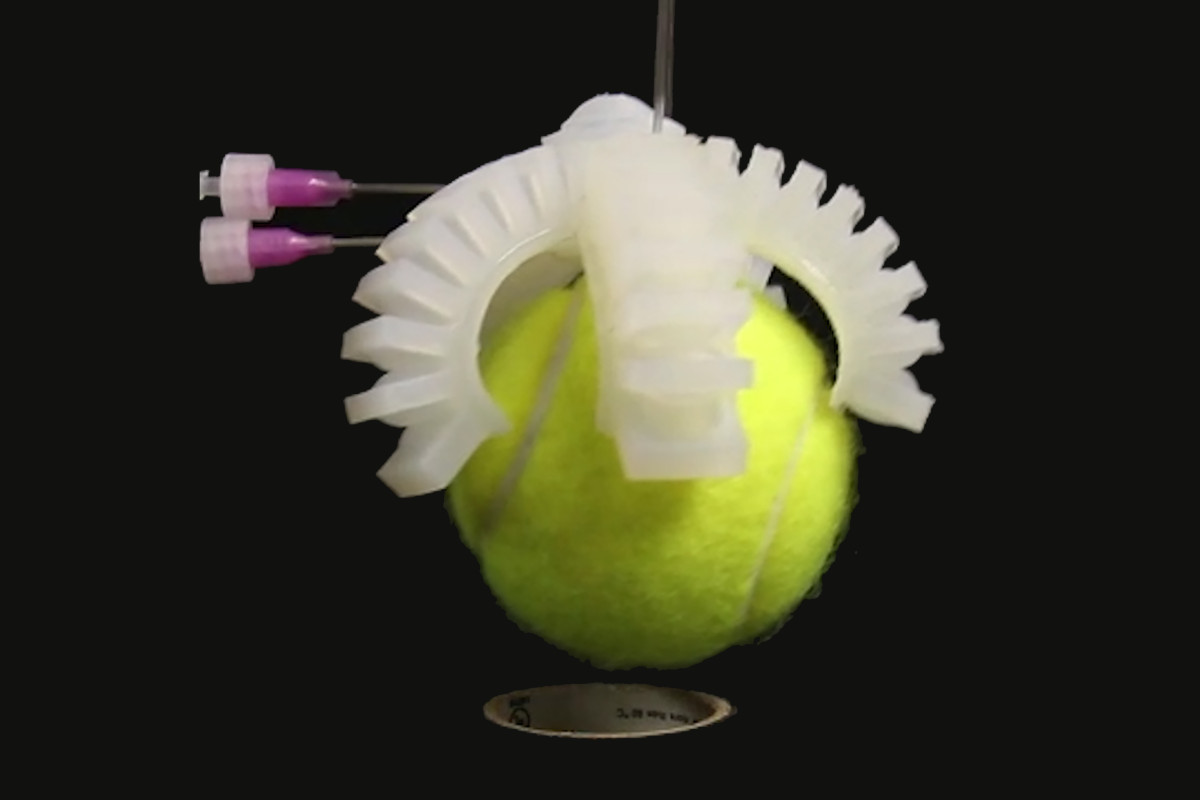
Сам робот представляет собой мягкую полимерную конструкцию, состоящую из нескольких конечностей, управляемых потоками воздуха – а сам воздух поступает по мини-трубкам, прикрепленным к ним. Главной особенностью нового робота-прототипа является то, что он может управляться очень быстро и без использования различных сторонних контроллеров и элементов управления, таким образом его движение осуществляется посредством передачи определенного воздушного импульса в том или ином объеме и частоте для придания ему определенного паттерна движений.
Несмотря на то, что сама команда под руководством профессора материального инжиниринга Кэтрин Бертольди явно не спешит делиться с широкой общественностью подробными сведениями относительно того, из чего именно и как именно был создан робот, она указывает, что всю работу тут выполняет базовый фреймворк, на котором построено взаимодействие робота и человека – либо робота и других систем робототехники, которые могут присутствовать в том или ином месте.
Определенная часть предварительных рабочих алгоритмов так или иначе соотносится с классическим понятием мягкой робототехники, однако представленный прототип явно заслуживает большего внимания к себе, главным образом за счет правильного распределения воздушной нагрузки и умения приспосабливаться к различным внешним обстоятельствам. Таким образом, представленный робот является действительно многообещающим.









